Az első rendszerek jóval megelőzték a közúti közlekedésben történő alkalmazást, bár mai szemmel nézve azok még igencsak kezdetlegesnek számítottak, ettől függetlenül vitathatatlan előrelépést jelentettek a precíziós gazdálkodás felé vezető úton, és ma is két külön alkalmazást és fejlesztési irányt képviselnek. Igaz, sok más háttértényező is kellett hozzá, hogy ma úgy működjenek, ahogyan elvárjuk, sőt még az agrárrobotikát is kiszolgálják, ha szükséges.
Tiltottból szabad felhasználás
Az 1990-es évek vége felé és 2000 körül már annak is örültek a közúti fuvarozók, ha 50-100 méteres pontossággal nyomon tudták követni, hol járnak éppen a kamionjaik. Igaz, méretüknél fogva ez még elegendőnek is bizonyult, ha valami probléma adódott a járművel vagy rakományával (műszaki hiba, rablás stb.). Ennek oka nem annyira a technikában keresendő, hanem sokáig világszerte nem engedélyezték polgári (civil) célokra az 1 méteres vagy még pontosabb, addig csak a hadseregek és esetleg különleges mentőalakulatok számára elérhető rendszereket. Kivételt csak a hajózás és a légi közlekedés jelentett.
Ma már teljesen megszokott, hogy a geodéták – akár mezőgazdasági földmérés, parcellázás, erdészet, építőipar céljából – centiméter-pontossággal dolgoznak, s szinte ugyanezen precizitásra képesek a sok tonnás traktorok, kombájnok, de a könnyű drónok és agrárrobotok is.
Önvezetés másképpen
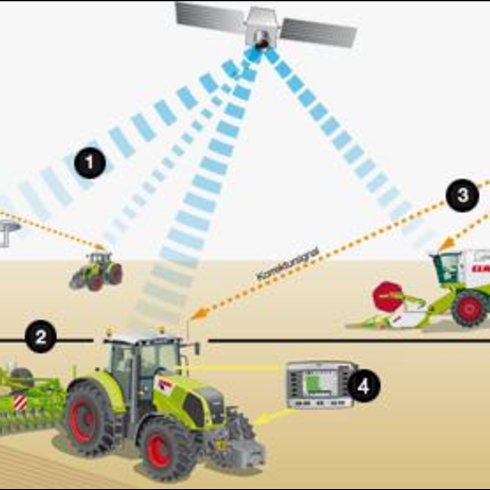
Az automata kormányzás valójában az önvezető kategória 1-es szintjéhez tartozik, azonban a közúti közlekedéshez képest bizonyos tekintetben sokkal fejlettebb. Nemcsak a 2-2,5 centiméteres pontossága miatt, hanem a szántóföldeken csakis a műholdas GPS-, valamint a földi állomások RTK-jeleikre támaszkodhat. Nincs sem útburkolati jel, sem szalagkorlát, sem másik jármű, amelyhez igazodhatna, és forgalmi tényezővel sem kell számolni. Amennyiben nem egyedül dolgozik a gép, például betakarításnál a kombájn vagy más gép mellett halad a pótkocsis traktor, akkor már a 2-es szintű önvezetésre van szükség.
A közúti és mezőgazdasági rendszerek bár nagyon hasonlóak, a leglényegesebb különbség a beérkező jelekben és érzékelőkben van. Továbbá a gépkocsik rendszere csak gyári kivitelű lehet, míg a mezőgazdasági gépeké utólag is beépíthető, azonban nem alkalmasak közúti közlekedésre.
Alkalmazások és kiválasztás
Minden bizonnyal ez a legnagyobb kihívás, hiszen ma már bőséges a gyártók és forgalmazók kínálata, másrészt a traktorkínálat is igen gazdag, nem beszélve az évjáratokról. Évjárat és technika vonatkozásban elég nagy szórás van és lehet, legfőképpen a kormányzáshoz szükséges erő az, ami kulcskérdés a kormánymű esetében az utólag felszerelt automata kormányzási rendszereknél. Tudjuk, minden forint számít, de ne az ár legyen döntő, hanem az, hogy az adott gépre telepített kormányzási rendszer tökéletesen ellássa a feladatát, különben nincs értelme beruházni.
Vannak a hidraulikus kormányműrendszerbe illeszthető kivitelek is, ezek a legjobbak, de egy teljesen más árkategóriát képviselnek, és nem az otthoni „szabadidős" szerelési gyakorlat kategóriájába tartoznak.
A beszerelést mindig érdemes szakavatott emberekre (műhely, kiszálló szerelő) bízni, mert nem elég felszerelni, megfelelően be kell állítani, letesztelni, vagy ha az időjárás engedi, akár egy kis próbamunkát végezni vele!
Sőt, a traktor vagy más munkagép kormányművét szintén célszerű átvizsgálni, amit egyébként is elvégeznénk például tavaszi szezonkezdéskor.
Rendszerek a háttérben
GPS-alapú automata kormányzás
A GPS-rendszer utasításai, jelei alapján gépünk önállóan, beavatkozás nélkül végzi a kormányzást. Ezek az eszközök többnyire csak soron tartják a gépet, de például visszafordulni a következő sorra már csak ritkán képesek, ezért ránk is szükség van a fülkében. Gyakori, hogy nagyon hosszú táblánál a rendszer megerősítést kér tőlünk, például egy gombnyomás formájában. A sort, a haladási irányt szintén nekünk kell előzetesen megadni, például a tábla elején és végén, valamint néhány köztes pontot.
A GPS-alapú automata kormányzás abban segít, hogy az elvégzendő feladatra koncentráljunk, például vetéskor, még rossz látási körülmények között is, megnövelve a napi teljesítményt a kritikus időablakokban. Lehet csökkenteni az inputanyagköltséget is, mert pont oda juttatunk ki tápanyagot, ahova kell. Nincsenek átfedések, kihagyott területek a földeken, míg az egyenes sorok minden munkafázisban megkönnyítik a munkát.
Ezen automata kormányzási rendszer pontossága két tényezőn alapul: a GPS-pozíció pontosságán (megvalósított mérési technológia) és az automata kormányzást végző eszköz pontosságán. Természetesen ezeknek mindenféle kombinációja létezik, azonban az automata kormányzás típusa átgondolt értékesítés és felhasználás esetén csak az alábbi kombinációkban életképes.
A GPS-kódméréses korrekció, az EGNOS (European Geostationary Navigation Overlay Service) nevével szinte minden, GPS iránt érdeklődő felhasználó találkozott már. Ez egy európai fejlesztésű kiegészítő rendszer, amely segítségével az amerikai GPS-műholdakra kapunk korrekciót.
Megfelelő méretű professzionális GPS-antenna használata esetén 15-20 cm-es pontosságot tudunk elérni, vagyis folyamatos munka közben a két szomszédos sor között mérhető hiba +/- 15-20 cm közötti. A visszatérési pontosság esetén (félbehagyott munka folytatása vagy másodszori művelés egyazon táblán) azonban ez a szám +/- 1-2 méter is lehet. Legfőbb előnye a szolgáltatásnak, hogy ingyenes.


A kormánykerék alá szerelt egyszerűbb megoldás a Sveanverkentől – fotók: www.sveav.com
GPS + GLONASS kódméréses korrekció
Egyszerűbben GNSS-nek hívják. Ez a technika egyszerre ötvözi az európai és az orosz műholdrendszerhez tartozó korrekciós szolgáltatásokat, de valójában önállóan csak GLONASS korrekciószolgáltatás nincs. Ugyanakkor a nyugat-európai szolgáltatások töredékéért (kb. 250 euró/éves díj) kaphatunk adatot, jelet, amellyel 10 cm körüli pontossággal tudunk dolgozni. Amennyiben csak a GPS-vevőnk képes venni a GLONASS műholdak jeleit, az még nem elegendő egy magasabb pontossági szinthez. Szükség van még olyan korrekciós szolgáltatáshoz is, amely tartalmaz korrekciót a GLONASS-holdakra is.
A GPS+GLONASS-vevőknek – gyártótól és vevőtípustól függően – minimum 3, 4 vagy 5 GPS-műhold jeleivel kell dolgozniuk akkor is, ha ezeken kívül 6-8 GLONASS műhold jeleit is érzékelik. Néhány műszerforgalmazó azt tanácsolja, hogy ha nagyon lassan vált a lebegő pozíció fixre, vagy ismert pontra mérve túl nagy az eltérés a mért és az ismert pozíció között, akkor kapcsoljuk ki a vevőn a GLONASS-jelfeldolgozást (vagy egyszerűen csak csatlakozzunk a GLONASS-korrekciót nem sugárzó pontra).
A magyarázat a GPS és a GLONASS-rendszer működési módja közötti különbségben keresendő. A GLONASS frekvenciafelosztású (FDMA), míg a GPS kódfelosztású (CDMA), többszörös hozzáférésű rendszer. Más szóval, a GPS-rendszernél mindegyik műhold azonos frekvencián sugároz, de műholdanként más-más kódot (CDMA), míg a GLONASS esetében a kód azonos, viszont a frekvencia minden műhold esetében más (FDMA).
Amikor a két rendszer a tervezőasztalon megszületett, lehetséges felhasználóként a hadseregre gondoltak és nem a farmerekre. Egyébként az eredeti célnak mindkét rendszer tökéletesen megfelelt, azonban a centiméteres pontossághoz jobb a CDMA-technológia.
A GNSS-vevő feladata, hogy megmérje a távolságot a műholdak és a vevő antennája között, és ezek ismeretében számítja ki az antenna koordinátáit. A távolságot annak az időnek a megmérése alapján határozza meg, amely szükséges, hogy a jel eljusson a műholdtól a vevő elektronikájába, a jelfeldolgozó egységbe. A műhold által kibocsátott jel útja két részre bontható: a műhold és a vevő antennája közötti szakaszra, valamint az antenna és a jelfeldolgozó közötti szakaszra.
A GNNS-korrekcióhoz RTK-hálózat alkalmazása a Claastól – fotó: www.claas-group.com
Magas szintű műholdas korrekciók
Ezen szolgáltatás átlagosan 1000-1500 euró/év összegért 4-10 cm-es csatlakozási pontosságot biztosít, közülük sok szolgáltatás idehaza szintén elérhető, mint például az SF2, CenterPoint RTX, OmniStar XP/HP/G2, hogy csak néhányat említsünk.
RTK: Földi bázisállomással megvalósított korrekció
Ez ma a létező legpontosabb pozíciómeghatározás, kb. 2 cm-es csatlakozási és visszatérési pontossággal. A rendszer díja attól függ, hogy saját magunk állítjuk-e elő a korrekciót vagy vásároljuk. Előbbihez bázisállomás szükséges, amely akár 10.000 eurós beruházás is lehet, míg vásárolt RTK-korrekciós szolgáltatás esetén évente akár 120-275 ezer forintot is fizethetünk a szolgáltatásért.
Utóbbinál fontos kérdés, hogy a 2 cm-es pontosságot mihez képest fogja biztosítani. A bázisállomás állhat önmagában, vagy a legprecízebbz ETRS89-es koordináta (az európai kéreglemezzel együtt mozgó koordináta) rendszerben. Ez azok számára lehet fontos, akik saját földjeik határait is pontosan szeretnék kimérni és kihasználni a munkák során.
A rendszerek felépítése, működése és főbb jellemzői
Az automata kormányzást végző rendszer feladata, hogy a traktor hátsó tengelyének középpontját tartsa, a talajszintre vetítve egy egyenesen tartva.
Az automata kormányzást végző eszközök 4 fő részből állnak: GPS-vevő, kezelőfelület, beavatkozóegység és vezérlő.
A beavatkozóegység állhat akár dörzskerékből vagy a kormányoszlopra helyezett fogas koszorúból és a hozzá kapcsolódó szervomotorból. A drágább, komplex és nagyobb teljesítményű rendszerek elektrohidraulikus szeleptömbből állnak, és közvetlenül a hidraulikakörbe csatlakoznak. De ma már vannak olyan megoldások is, amelyeknél nincs fizikai kapcsolat a kormányzás és a kormánykerék között, ezek az úgynevezett „fly by wire" rendszerek, és ezeknél a legkönnyebb automata kormányzást telepíteni.
A rendszer minden részéből a vezérlőegységben futnak össze a jelek és valósul meg az automata kormányzás. Ez az egység tartalmazza a dőlésmérőt, amely lehet 2 (dőlésre, fordulásra) vagy 3 (dőlésre, fordulásra, bólintásra) tengelyre optimalizált, gondoljunk csak egy dombvidéken dolgozó traktorra. Vannak giroszkóppal ellátott rendszerek is, amely a menetirányt érzékeli, míg más rendszerek GPS-vevőegysége két antennával dolgozik a menetirány érzékeléséhez. A legnagyobb pontossághoz elengedhetetlen a kormányzott keréken lévő érzékelő, ami folyamatosan figyeli az első kerék állását, elkormányzását.
Fontos megjegyezni, hogy a klasszikus automata kormányzási rendszerek csak a traktort irányítják, a kapcsolt eszközök, munkagépek teljesen a vezetőre vannak bízva. Az automata kormányzási rendszereket ki lehet egészíteni olyan egységekkel, amelyek a vontatott munkagépet is figyelik, esetleg aktívan kormányozzák, ha kormányzott kerekekkel (is) rendelkezik.

A közismert FieldBee rendszere – fotó: www.products.fieldbee.com
A beavatkozó- és vezérlőegységek kombinációja alapján a következő automata kormányzási típusok léteznek:
• dörzskerekes automata kormányok,
• kormányoszlopra felrakható kormányautomatikák,
• utólagosan a hidraulikába épített robotpilóta-rendszerek,
• gyári hidraulikába épített robotpilóta-rendszerek.
Az egyik megoldás, amikor az automata kormányzást egy külső motor végzi el, és dörzskerékkel adja át a meghajtást a gyári kormánykeréknek. A vezérlőegység 2 tengelyre (hosszanti és keresztirányú) optimalizált. Szögjeladót ez a megoldás általában nem tartalmaz, ezért nem olyan pontos, mint fejlettebb társai. Könnyen, gyorsan felszerelhető, ezért több gépen is egyszerűen használható. A dörzskerék azonban fogyóeszköz, érdemes tartalékolni belőle, mert a kopással arányosan romlik a pontosság. A dörzskerék pontatlanságából adódóan ezt a rendszert leginkább az ingyenes vagy olcsó műholdas korrekciókkal érdemes használni.
Ez az automata kormányzás inkább kényelmi előrelépést jelent az egyszerű sorvezetőkhöz képest, mintsem precízebb munkavégzést. Ezért főleg olyan munkákhoz használjuk, ahol eddig sorvezetővel dolgoztunk, mint például a műtrágyázás és permetezés. Átlagosan 1-1,5 millió forintért szerezhető be.
Az értékesítők ezek felszerelését gyakran úgy hirdetik meg, hogy egyszerűen elvégezhető, de azért nem árt néhány órát rászánni. A gyári kormánykereket minden esetben le kell szerelni, ami a legtöbb időt igényli egy-egy régebbi gépnél. Majd fel kell szerelni a kormány alá azt a motort, amely a kormányzást végzi. A vezérlőegység ellenben akár 3 tengelyre vetített dőléskompenzálót is tartalmazhat. A kormányzott keréken többnyire ezek sem tartalmaznak szögjeladót, rontva a pontosságot. Egy jól beállított kormányzással talajviszonytól függetlenül képes a gépet 5-8 centiméteren belül a GPS által kijelölt elméleti egyenesen tartani, kihasználva a fizetős műholdas korrekciók szintjét.
RTK-val kiegészítve már a gyakorlati teljesítőképesség határát feszegeti. Amennyiben a traktorvezető is aktívan részt vesz a finomabb kormányzásban, akkor stabilan 5 centiméter alá csökkenthető a hiba, ezért már érdemes fejleszteni a GPS-t az RTK-pontosságig. Az árak ekkor nagyjából 2 millió forinttól 3-3,5 millió Ft-ig terjednek.

A Case IH kormányzási rendszere egy Puma traktoron – fotó: www.caseih.com
Ebben az esetben már a kormányzást egy olyan egység végzi, amelyet közvetlenül a kormánymű hidraulikakörébe építünk be. Mivel a beépítés utólagos, így bármilyen orbitos kormányművel rendelkező erőgépre felkerülhet. Egy GPS-gyártó cég által támogatott gép esetén előre megtervezett és legyártott rendszert kell beépíteni, de léteznek a gyártóknál univerzális beépítő készletek a nem támogatott gépekhez. Kellő szaktudással és gyakorlattal ezek a gépek is ugyanúgy felszerelhetők, és a végeredményben nem fognak különbözni a támogatott gépek működésétől. A gép mozgásából eredő hibák kiküszöbölését egy 3 dimenziós dőlésmérő végzi, figyelembe veszi a dőlést, fordulást és a bólintást is.
A legpontosabb GPS-pozíciók kihasználására is képes, amennyiben van szögjeladó az első kerék mögött. A több információ mindig pontosabb kormányzást eredményez. Megfelelő beállításokkal 2-3 centiméteres belül tartható az elméleti egyenestől való letérés, kihasználva az RTK-pontosságú GPS-t. Az alacsonyabb kategóriájú automata kormányzásokkal ellentétben sokkal hamarabb már a sor végi átfordulás után azonnal átadható az emberi kormányzás a robotpilótának, és több figyelmet fordíthatunk a többi munkafázisra. Az árak itt hozzávetőlegesen 3-5 millió Ft-ig terjednek.
Tulajdonságait és teljesítményét tekintve teljesen megegyezik a hidraulikába épített automata kormányzási rendszerekkel, és a traktorba elrejtve vannak beépítve a beavatkozóegységek. A legtöbb GPS-gyártó ezekre az előkészített rendszerekre tud ráépülni saját egységeivel a tökéletes, személyre szabott automata kormányzás érdekében.
A jelen és a közeljövő, amikor gyárilag elektrohidraulikus kormányzással rendelkezik a traktor. Bár egyelőre még kevés ilyen típus van, de a jövő, a fejlődési irány ez lesz. Ezekben a gépekben az utólag beszerelt automata kormányzási rendszer a gyári CAN-hálózaton át kommunikál, azaz nem a beavatkozóegységhez csatlakozik közvetlenül.







_fill_540x300_0.jpg)


_fill_100x75_0.jpg)

_fill_100x75_0.jpg)





